
自主性,是微机器人领域最难啃的骨头
对机器人来说,自主性意味着系统能够在没有持续外部指令的情况下,独立完成长周期任务。这一目标在宏观机器人上已有大量成熟方案,但当机器人尺寸缩减至微米量级,几乎所有已知的板载计算与存储方案都失效了。
现有医用微机器人大多处于全程遥操作状态:由磁场驱动,或由光场触发释放,每一步都需要外部系统实时介入。一旦撤除外部信号,机器人停止工作,任务中断。微机器人无法在体内保存任何状态信息,更无法根据历史感知结果调整后续行为。对于需要数天乃至数周持续干预的肿瘤治疗而言,这极大限制了其临床转化潜力。
上海创智学院联合同济大学的研究团队选择向生命本身寻求答案,他们利用合成生物学中的基因编辑技术,设计了多模块基因遗传电路,使微型机器人感知并记住外部信号,实现了其在体内持续自主执行抗肿瘤任务,相关工作发表于权威期刊《Science Advances》。
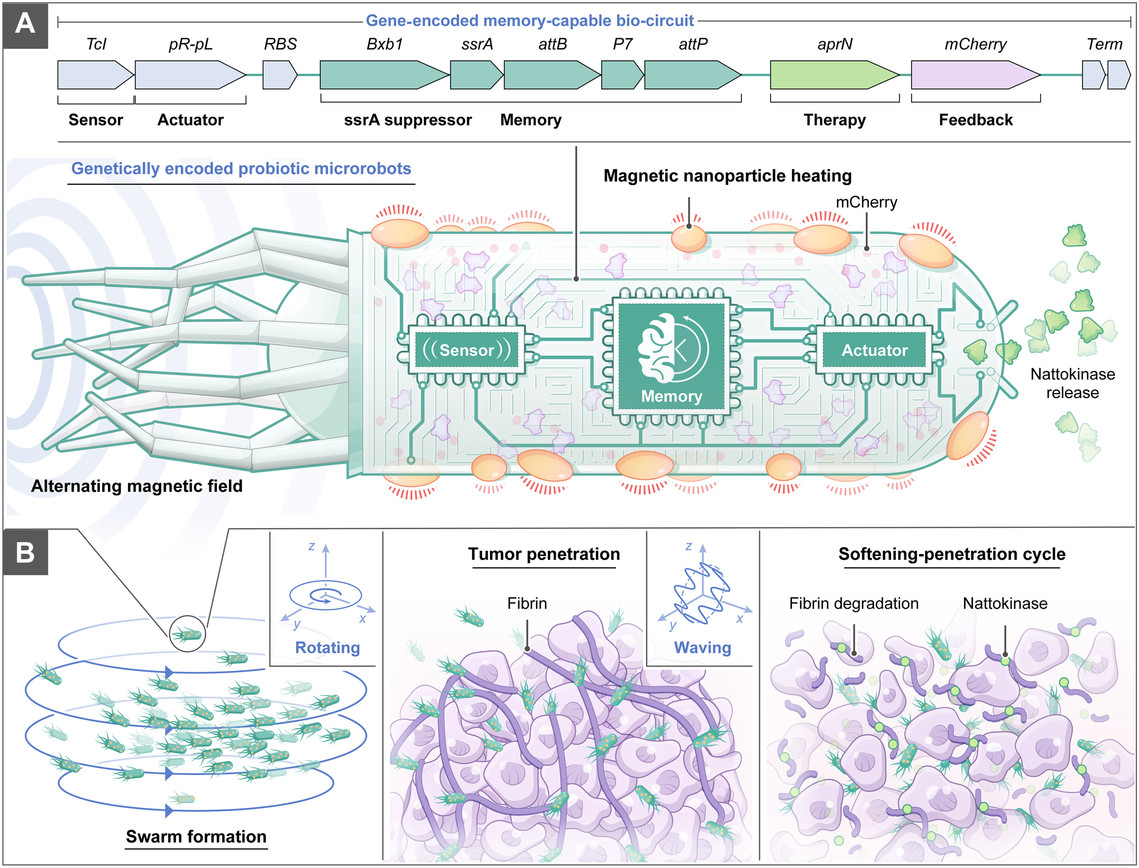
图1 集成记忆元件的生物机器人持续抑制肿瘤示意图
板载记忆的实现:遗传电路作为持久状态存储
研究团队以益生菌大肠杆菌Nissle 1917作为微机器人本体,通过基因编辑在菌体内构建了一套五模块协同的遗传控制电路:热感应、执行、记忆、治疗与荧光反馈。整套逻辑运行在菌体自身的生化机制之内,激活后不依赖任何外部器件即可持续执行任务。
记忆写入的触发方式简洁而精确,在菌体表面修饰的磁性纳米颗粒在交变磁场作用下产生热量,将局部温度推升至42°C以上。这一温度阈值激活菌体内的热感应模块,进而触发遗传记忆电路,使相关基因片段发生永久特异性重组,将系统状态锁定在“持续工作”模式,无需任何外部信号维持。具有遗传记忆的微机器人,在单次激活后72小时内的软化剂持续释放量比无记忆对照组高出2.13倍;荧光标记强度高出7.8倍。体内 mCherry 信号在肿瘤中12天仍可检测,表明其在体内至少可以维持12天活性,证明了遗传记忆模块的持续有效性。
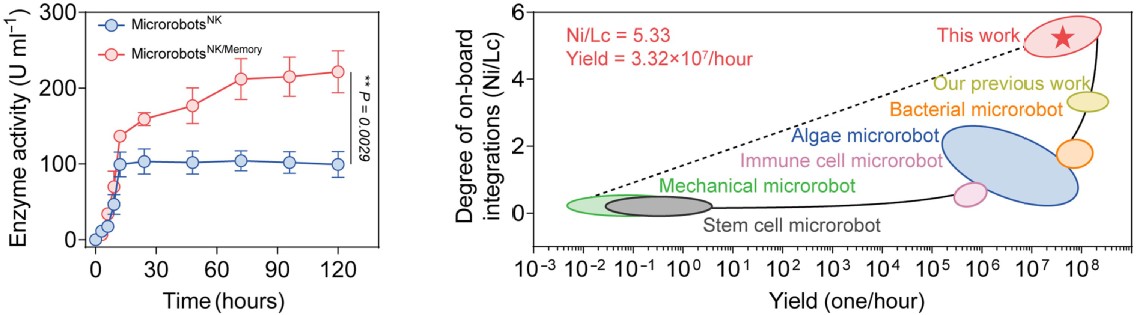
图2左:装载记忆模块与无记忆功能的微型机器人的纳豆激酶(NK)产生能力对比图。右:文献报道微型机器人的机载集成度与制备产量对比图。
运动策略:高硬度组织环境下的步态设计与优化
解决了“记忆”问题之后,团队面对的第二个核心挑战是运动:如何驱动微机器人群有效穿越高硬度的生物组织?在微米尺度,传统磁控微机器人通常依赖翻滚步态向前运动,但在软组织中有效法向支持力随接触面积动态变化,实测推进速度仅为纯滚动理论上限的约 30%。这是由于所需摩擦力频繁超过可用静摩擦力上限,导致机器人“打滑”而非前进。
研究团队对此进行了步态层面的系统优化,设计了三维波浪步态:在原有平面旋转磁场的基础上叠加第三轴振荡分量,使机器人在前进过程中产生类似船桨的波动姿态。这一改动从物理机制上缓解了打滑问题。引入的第三轴振荡持续增大有效接触面积,从而主动提升可用摩擦力,将运动模式从“打滑”切换为稳定推进。上述性能差异不仅在体外胶原凝胶模型中得到验证,也在活体肿瘤实验中得到了印证。
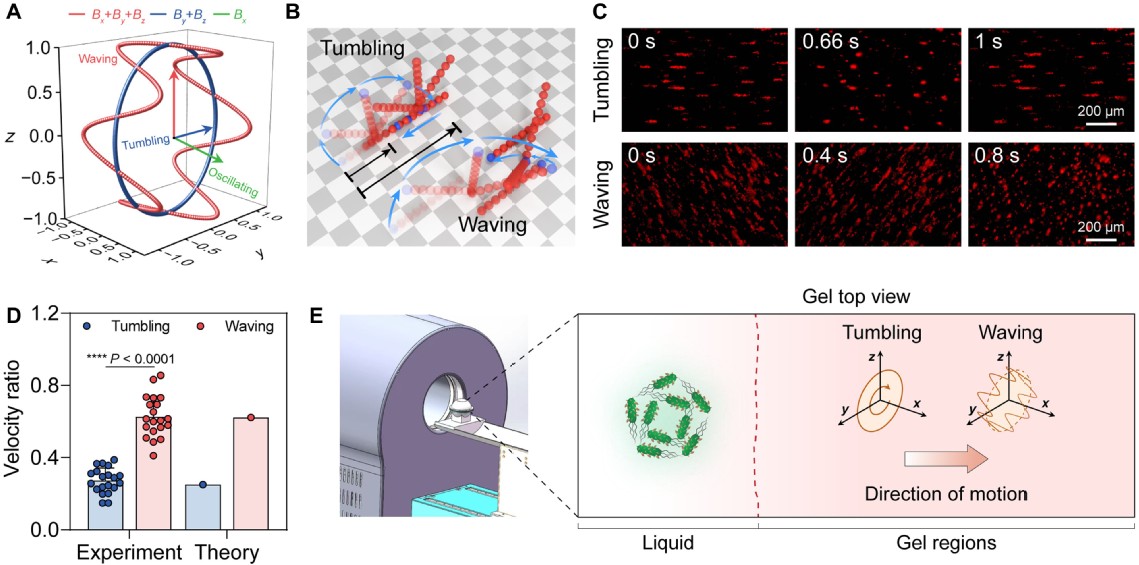
图3 (A)面内翻滚磁场和波浪磁场示意图。(B)两种磁场下微型机器人运动示意图。(C)微型机器人集群的翻滚运动和波浪运动实验图。(D)翻滚与波浪两种运动模式下实验速度、理论速度及理论最大速度的比较。(E)磁场驱动微型机器人集群穿透不同刚度凝胶的实验示意图。
主动改造环境:软化—穿透正反馈闭环
这项研究在系统设计层面最值得关注的一点,是机器人与环境之间的主动交互方式。微机器人不是被动适应所在的组织环境,而是通过持续的生化作用改变环境,再利用改变后的环境反哺自身的运动能力。
具体而言,微机器人持续分泌软化剂,降解并软化肿瘤基质;基质变软后,波浪步态所需克服的运动阻力随之降低,机器人得以穿入更深处;深入后的机器人将软化剂带到了原本无法到达的区域,进一步扩大软化范围。软化和穿透形成自强化的正反馈回路,单次激活后无需外部系统持续介入调节,而磁场驱动的波浪运动则进一步增强组织穿透。与缺失记忆模块的对照组相比,具备遗传记忆且采用波浪步态的微机器人群,肿瘤抑制率从21.86%跃升至87.52%,压缩模量降至对照组的约1/11.38。这个治疗平台依靠持续自主执行与高效运动穿透,两者缺一不可,协同增效。
该协同增效方案体现了主动改造环境以提升自身行动能力的具身智能,机器人通过与环境的持续物理化学交互,动态重塑自身的行动空间。这与具身智能领域探讨的“环境可塑性”问题在逻辑上高度一致,只是实现载体从宏观机械臂变成了微米级的活体菌群。
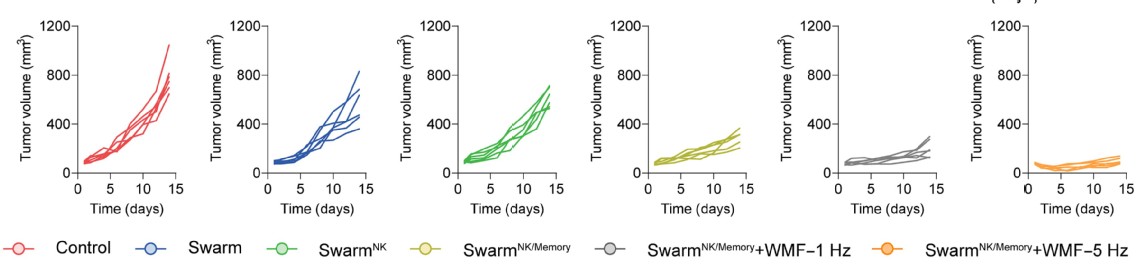
图4. 不同治疗组小鼠肿瘤体积随时间的变化图。(从左到右分别是:对照组,微型机器人集群,集群+NK,集群+NK+记忆模块,集群+NK+记忆模块+1Hz波浪磁场,集群+NK+记忆模块+5Hz波浪磁场)
微型机器人长期以来是一个充满想象但工程实现极度受限的领域。这项工作展示的,不只是一种新的治疗手段,更是一套在极端约束下重新设计“自主系统”的新范式。该系统利用生物体自身机制与精心设计的遗传电路协同作用,填补微尺度硬件无法覆盖的功能空白。相关的设计理念也可为复杂、动态、资源受限环境中的具身系统自主运行研究提供启发。
本研究由上海创智学院、同济大学、同济大学医学院等多个单位联合完成,上海创智学院2025级博士生陈玉峻与同济大学博士研究生陈浩田为共同第一作者,通讯作者为上海创智学院全时导师、同济大学教授印真与同济大学教授成昱。研究获得国家重点研发计划、国家自然科学基金等多项资助。
原文链接:https://www.science.org/doi/10.1126/sciadv.aeb2528
